Thông tin sản phẩm
Abstract
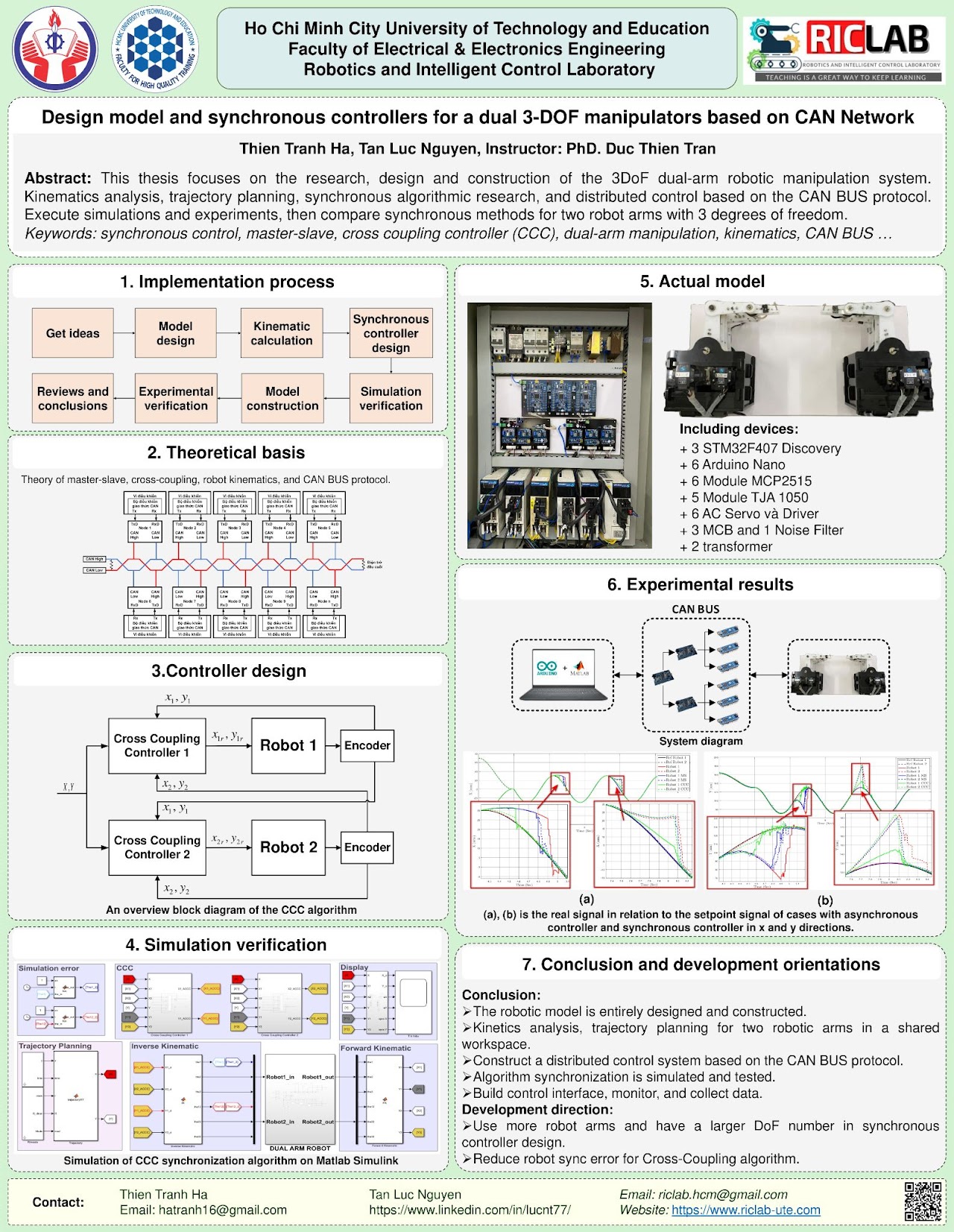
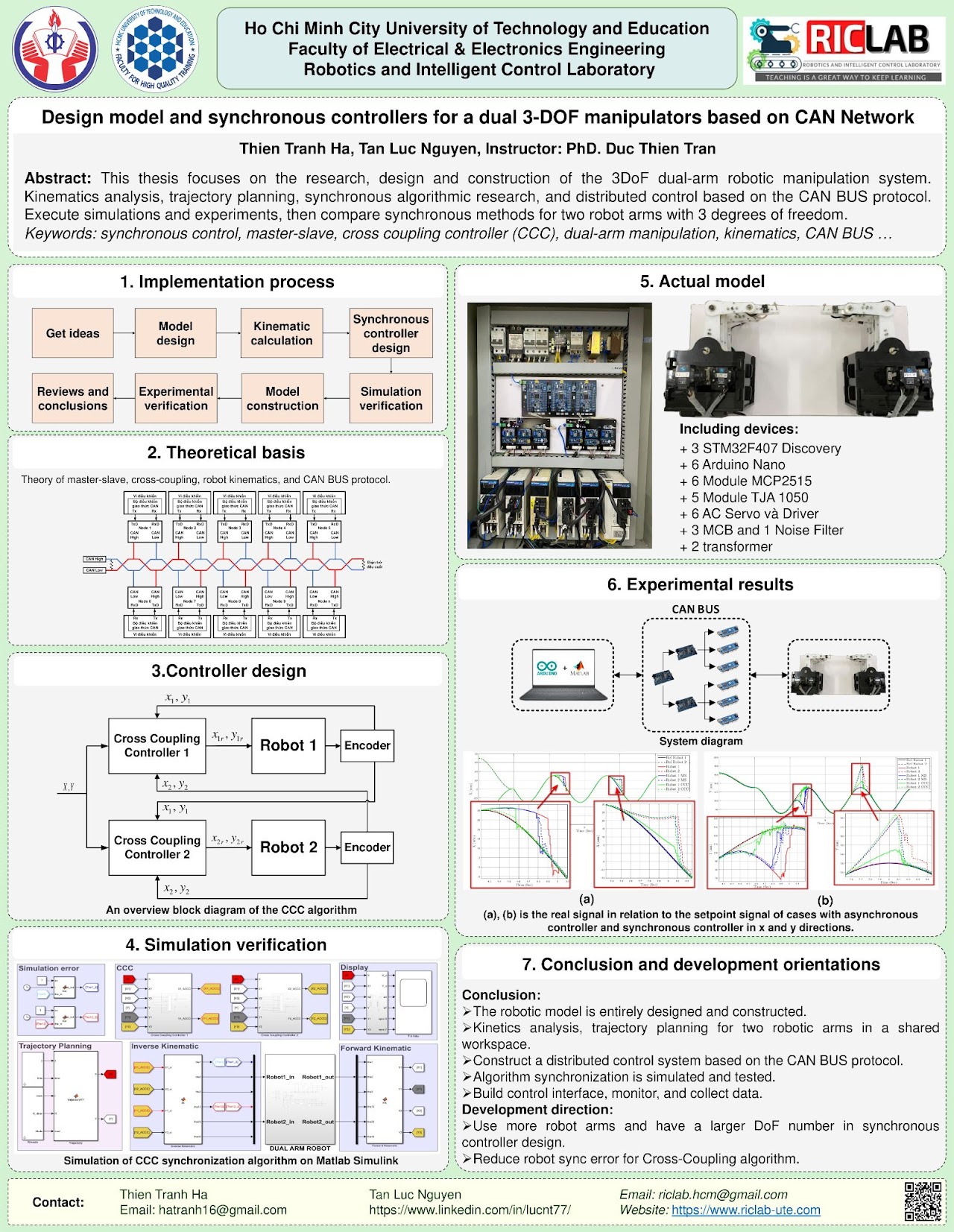
This thesis focuses on the research, design and construction of the 3DoF dual-arm robotic manipulation system. Kinematics analysis, trajectory planning, synchronous algorithmic research, and distributed control based on the CAN BUS protocol. Execute simulations and experiments, then compare synchronous methods for two robot arms with 3 degrees of freedom.
Keywords
Synchronous control, master-slave, Cross Coupling controller (CCC), Dual-arm manipulation, Kinematics, CAN BUS, ...
Members
POSTER