Thông tin sản phẩm
Keywords
Fault tolerant control, Sliding mode control, Computed torque control, Robot manipulator
Members
System block diagram

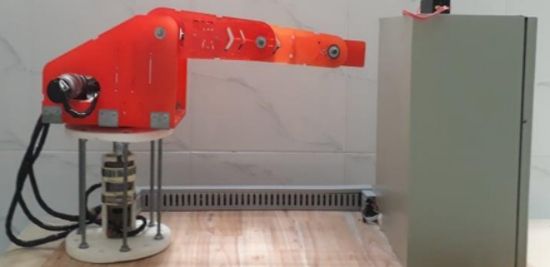
Experiment model

Simulink model

HỖ TRỢ BỞI Sancongnghe.tech:
* SanCongNghe.tech HỖ TRỢ LIÊN HỆ THƯƠNG MẠI VỚI DOANH NGHIỆP NÀY.
*SanCongNghe.tech ĐẢM BẢO THEO DÕI VÀ HỖ TRỢ THƯƠNG MẠI GIỮA CÁC BÊN (Về đảm bảo hoạt động giao dịch, tiến độ sản suất, cung ứng hợp đồng và các tranh chấp pháp lý)
- Nếu không tìm thấy mặt hàng và đơn vị phù hợp: liên hệ với SanCongNghe.tech để được hỗ trợ tìm đối tác phù hợp
Fault tolerant control, Sliding mode control, Computed torque control, Robot manipulator




Dưới 50 nhân viên