Thông tin sản phẩm
Abstract
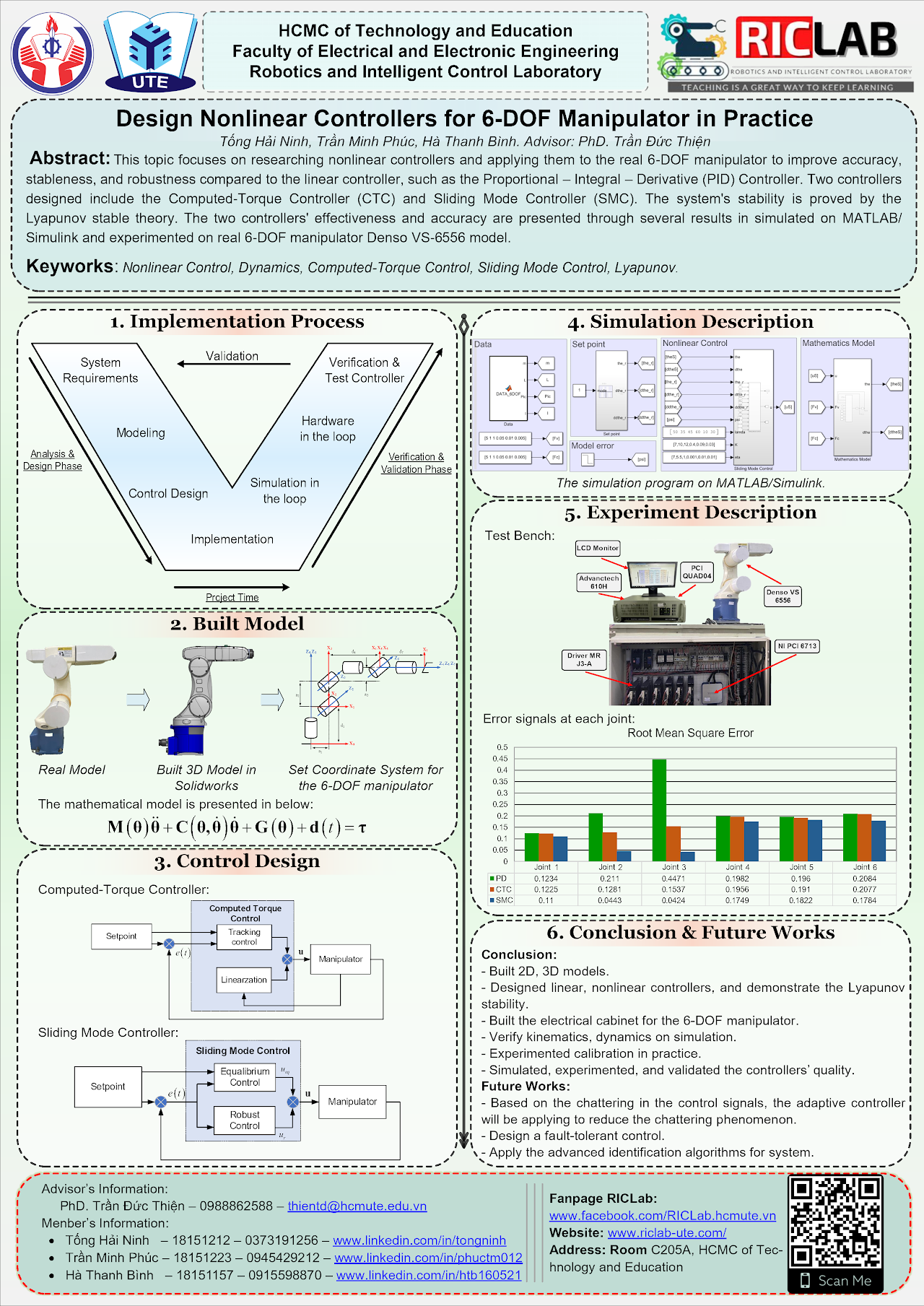
This topic focuses on researching nonlinear controllers and applying them to the real 6-DOF manipulator to improve accuracy, stableness, and robustness compared to the linear controller, such as the Proportional – Integral – Derivative (PID) Controller. Two controllers designed include the Computed-Torque Controller (CTC) and Sliding Mode Controller (SMC). The system's stability is proved by the Lyapunov stable theory. The two controllers' effectiveness and accuracy are presented through several results in simulated on MATLAB / Simulink and experimented on real 6-DOF manipulator Denso VS-6556 model.
Keywords
Nonlinear Control, Dynamics, Computed-Torque Control, Sliding Mode Control, Lyapunov.
Members
POSTER