Thông tin sản phẩm
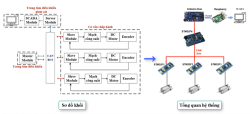
This thesis aims to toward the research methods, design, construction, and network system operation to control a model of Planar robot arm that can be moved flexibly. Robot control with a combination of motors, encoder and the space of each link can delay the system signal, making the system unstable. A standard communication to synchronize the system’s operation is estimated to handle the above problem, such as the Canbus protocol. In this report, the systems are designed with two control layers according to the Master-Slave model. In which, Slave collects data and Master processes data through the same communication protocol. CAN bus protocol meets the requirements of stability and operating performance. With the application of a network control system for manipulators, the system stability and control quality are improved and provides scalability for devices, controllers in the future.
CAN BUS, Distributed control, SCARA robot