Thông tin sản phẩm
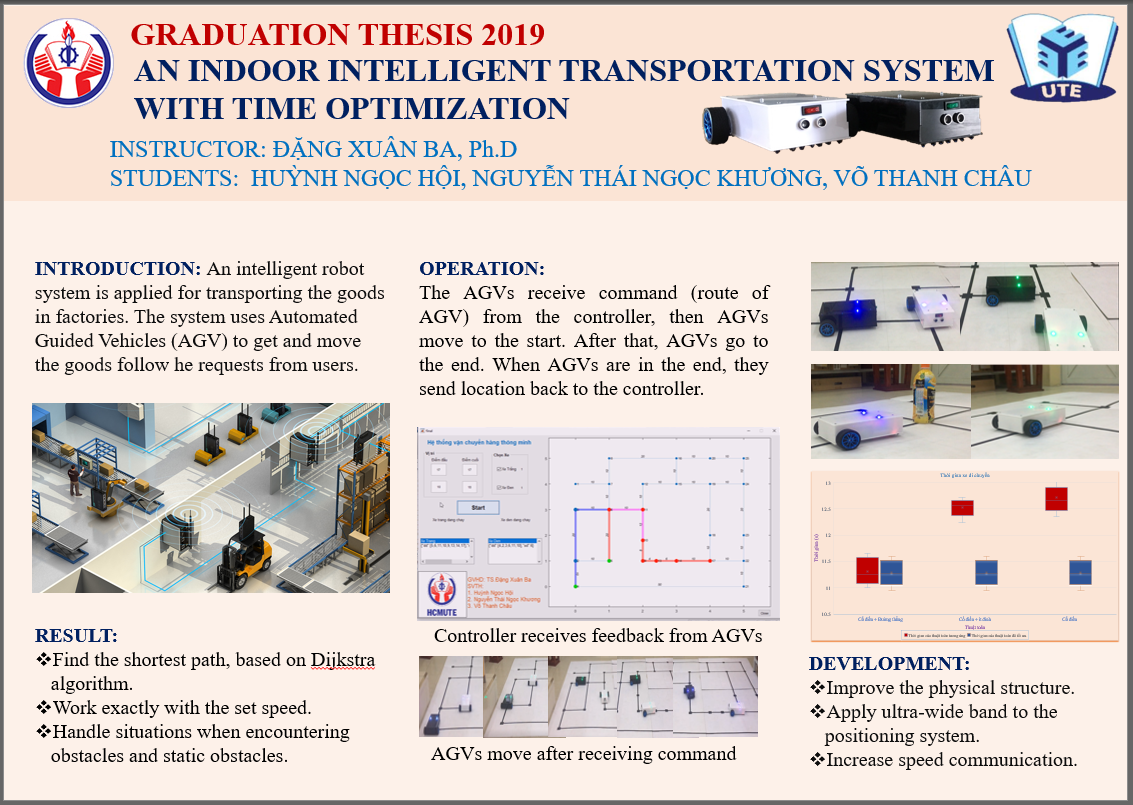
This research aims to develop an intelligent robotics system for indoor transportation applied in factories. The system uses Automated Guided Vehicles (AGV) to get and move the material based on the user requests. The key technology of this study is improvements on the Dijkstra optimization algorithm. Its effectiveness is theoretically proven and successfully verified both by simulation and experiments. The tested results confirmed that the modified algorithm could averagely reduce the transportation time up to 15% as comparing to previous ones. Moreover, the system still supports several abnormal operation modes such as obstacle avoidance.
Authors: Huynh Ngoc Hoi, Nguyen Thai Ngoc Khuong, Vo Thanh Chau, and D. X. Ba
Video demo: